Software Copyright Demo
项目总览
已申请软件著作权
智能农业采摘控制管理系统软件
本演示项目围绕田间采摘的真实痛点设计:人工判断强、劳动强度高、成熟度识别不稳定、机械执行与数据反馈难闭环。系统将视觉感知、AI 判断、运动控制、机械结构和运行监控串成完整链路。

项目解决的核心痛点
- 采摘工人需要长期观察成熟度、判断位置、控制力度,劳动强度高。
- 光照变化、枝叶遮挡和果实分布不均,容易造成漏采、误采或损伤作物。
- 单纯机械执行无法适应田间动态环境,需要感知数据与控制策略联动。
- 传统规则控制缺少数据闭环,难以持续优化采摘节奏和机械臂动作。
系统核心闭环
视觉/传感器采集
AI 辅助判断
控制指令生成
机械执行反馈
Perception Module
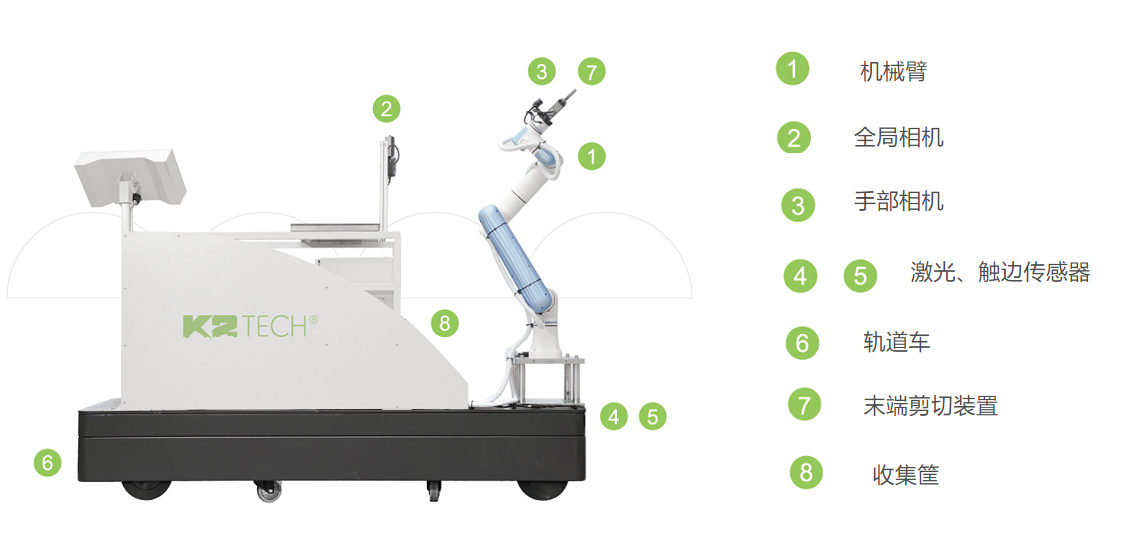
视觉感知与目标识别
通过相机与传感器获取作物位置、成熟度、遮挡情况和环境信息,为后续机械臂定位和末端采摘动作提供输入。

成熟果实
识别结果:可采摘
置信度 92%
半成熟果实
识别结果:延后采摘
置信度 68%
未成熟果实
识别结果:跳过目标
置信度 41%
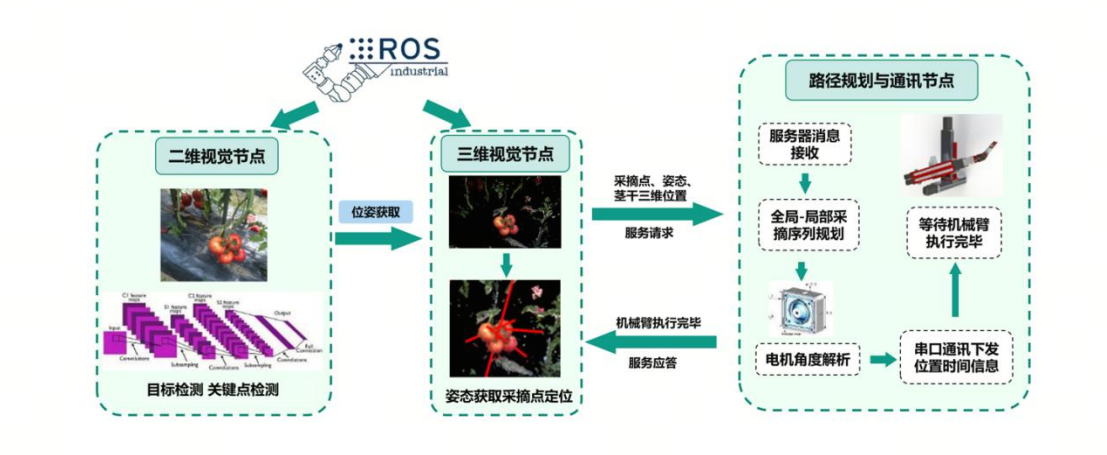
Control Chain
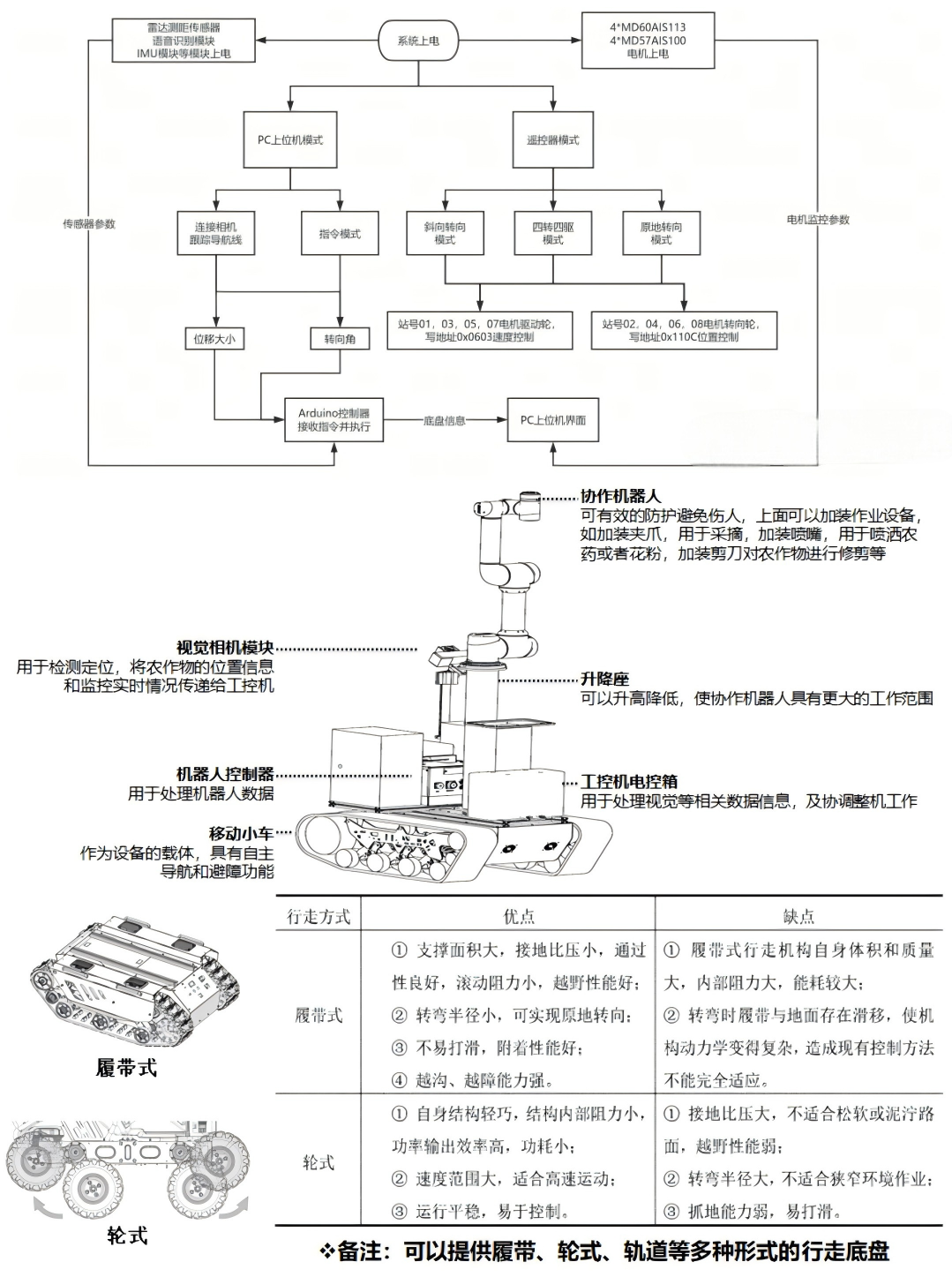
从识别到执行的控制链路
系统以“上位机模式 + 遥控/自动模式 + 底层控制器执行”为核心,让传感器数据、运动控制参数和执行反馈形成闭环。
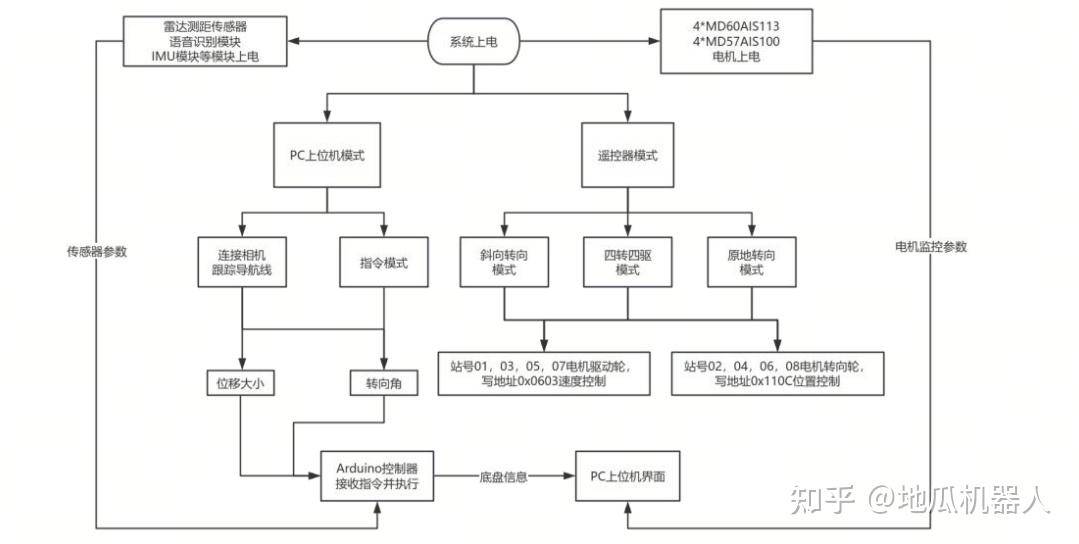
01 感知输入
接入相机、雷达、IMU、语音/传感器信息,形成环境和目标数据。
02 上位机分析
根据位移、角度、成熟度和目标位置生成控制建议。
03 控制器执行
底层控制器接收命令,驱动底盘、升降台、机械臂和末端装置。
04 状态回传
电机监控参数和底盘信息返回上位机,形成下一轮判断依据。
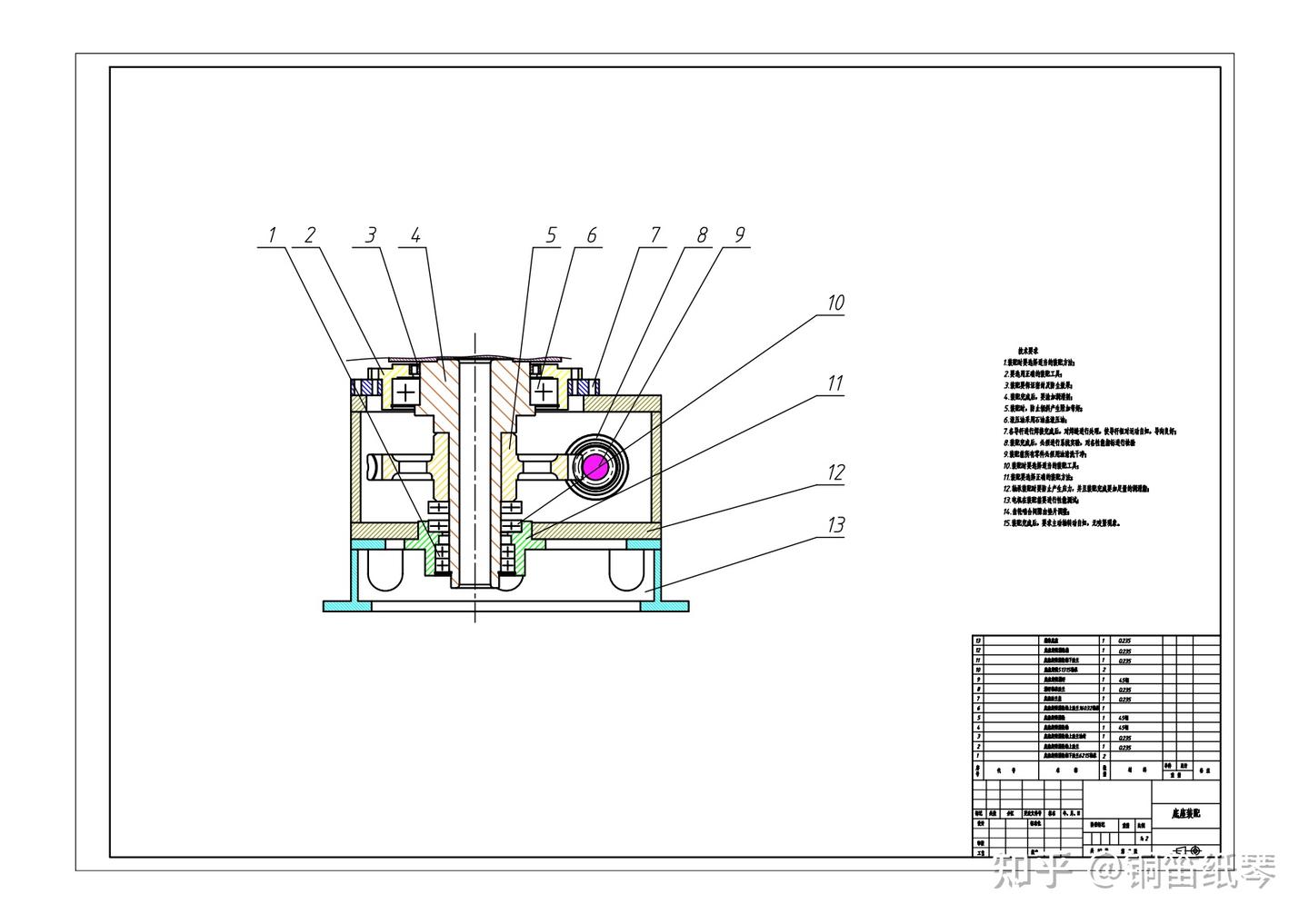
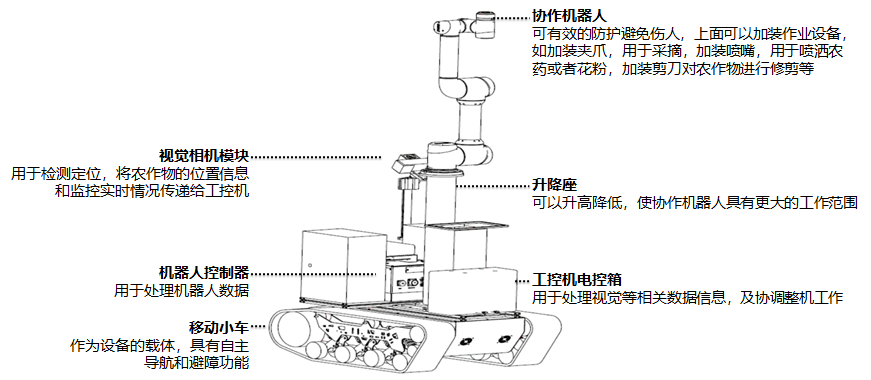
Mechanical Structure
机器人结构与行走底盘
展示移动小车、视觉相机模块、机器人控制器、升降座、协作机械臂、工控机电控箱和不同底盘方案。

AI Agent Workflow
Claude Code + Cursor 的长链推理与多 Agent 协作
开发过程不是“让 AI 写几段代码”,而是用 Agent 把复杂工程拆成可执行、可验证、可沉淀的多个任务链。
长链推理流程
- 痛点分析:从人工采摘的劳动强度、成熟度判断、遮挡误差和作物损伤问题出发。
- 模块推导:推导系统需要视觉感知、传感器采集、机械臂控制、底盘控制、上位机管理。
- 算法设计:整理 BP 神经网络流程:输入读取、前向计算、误差计算、反向传播、权重更新和权重保存。
- 控制闭环:将识别结果转化为运动控制指令,再通过电机状态、底盘信息和执行结果回传。
- 材料沉淀:把代码、说明书、结构图和软著材料整理成可提交、可演示的成果。
多 Agent 协作角色
需求分析 Agent拆解农业采摘场景、用户流程和痛点。
代码审查 Agent检查数据流、控制逻辑、函数调用和潜在遗漏。
算法解释 Agent梳理 BP 网络训练、误差回传、权重保存等流程。
文档整理 Agent统一软著说明、在线演示和项目介绍的表达。
Claude Code
作为主要工程 Agent,用于需求拆分、模块设计、控制链路梳理、代码逻辑检查和说明文档整理。
Cursor 60 美元套餐
作为代码上下文助手,用于在具体文件中补全、重构、查找调用关系、调整前端演示页面与文档表述。
Runtime Monitor
运行监控与交互模拟
本页面模拟采摘控制系统的实时状态。点击按钮可以查看控制日志变化,用于在线演示“数据反馈”效果。
设备状态
环境温度26.4 ℃
环境湿度61 %
底盘速度0.42 m/s
机械臂角度38 °
识别目标3 个
控制操作
系统日志
Project Evidence
项目证明与提交建议
本页面可作为 Xiaomi MiMo 申请表“GitHub 项目链接或产品在线演示地址”的展示入口。部署后建议在 README 中补充软著证书截图、源代码片段、账单截图和运行日志。
软著项目
《智能农业采摘控制管理系统软件》
可补充:软件著作权证书截图、申请受理截图或材料目录。开发工具
Claude Code + Cursor 套餐
可补充:Cursor 账单截图、Claude Code 终端运行记录或开发截图。代码证明
源代码、控制流程、BP 神经网络训练逻辑
可补充:GitHub 仓库、部分可公开代码、模块说明。演示证明
在线登录、分页面展示、运行监控模拟
账号:admin,密码:admintest。